
Patrick Lühne
Media
Paper (PDF)
GravitySpace: Tracking Users and Their Poses in a Smart Room Using a Pressure-Sensing Floor
Proceedings of CHI 2013, 725–734
Press
New Scientist
Touch-sensitive video-screen floor is in step with you
January 23, 2013
Phys.org
GravitySpace shows how floors will smarten up
January 24, 2013
Geek.com
Researchers aim to revolutionize the home with GravitySpace, a video smartfloor
January 27, 2013
Digital Trends
Could you live in a house filled with smart floors?
January 28, 2013
GravitySpace
Tracking Users and Their Poses in a Smart Room Using a Pressure-Sensing Floor
Alan Bränzel, Christian Holz, Daniel Hoffmann, Dominik Schmidt, Marius Knaust, Patrick Lühne, René Meusel, Stephan Richter, and Patrick Baudisch. In Proceedings of CHI 2013, 725–734.
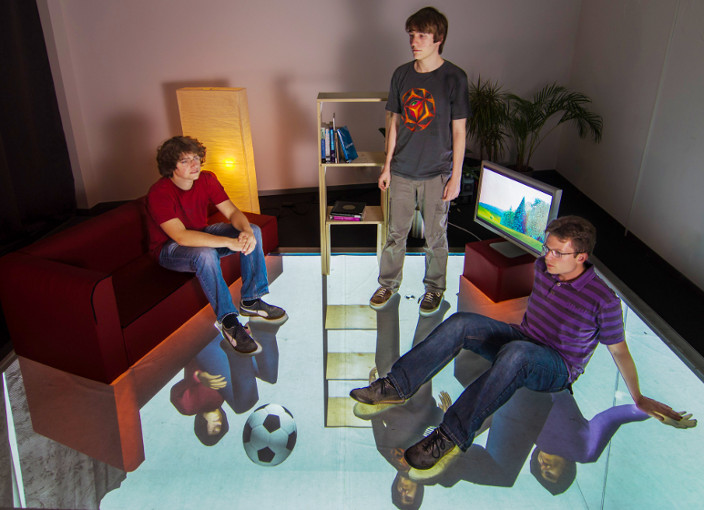
GravitySpace is a new approach to tracking people and objects indoors. Unlike traditional solutions based on cameras, GravitySpace reconstructs scene data from a pressure-sensing floor. While the floor is limited to sensing objects in direct contact with the ground, GravitySpace reconstructs contents above the ground by first identifying objects based on their texture and then applying inverse kinematics.
Smart rooms support users by offering not only a series of convenient functions, like home automation, but also by acting pro-actively on the user’s behalf. To this end, such rooms need to know their own geometry as well as the people and their actions within it.
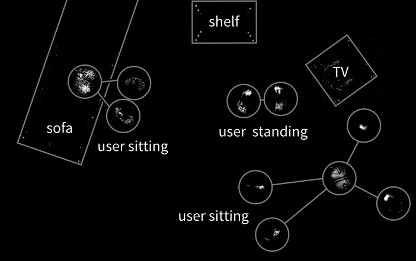
Figure 2
GravitySpace sees the scene from Figure 1 as a set of contacts (circles, lines, and text added for clarity).
We propose to use high-resolution pressure-sensitive floors as a new approach for tracking people and furniture in smart rooms. While the floor is limited to sensing direct contact with its surface, we can conclude what takes place in the room above, such as users’ poses or collisions with virtual objects.
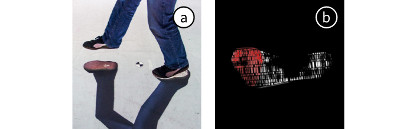
Figure 3
GravitySpace (a) derives the foot location above the floor based on (b) pressure distributions of the other foot.
Pressure-based sensing on the floor offers four potential benefits over camera-based solutions: (1) it provides consistent coverage of rooms wall-to-wall, (2) is less susceptible to occlusion between users, (3) allows for the use of simpler recognition algorithms, and (4) intrudes less on users’ privacy.
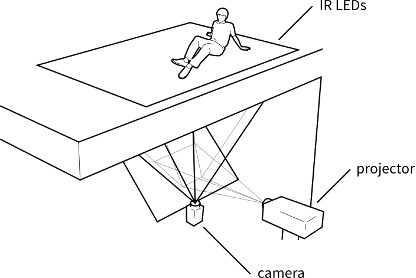
Figure 4
The GravitySpace prototype senses pressure at 1 mm resolution and projects across an active area of 8 m² in a single seamless piece—a 10 × larger version of Multitoe.
To explore our approach and to demonstrate our vision true to scale, we have created an 8 m² back-projected floor prototype, termed GravitySpace, a set of passive touch-sensitive furniture, as well as algorithms for identifying users, furniture, and poses.
GravitySpace is a research project by Alan Bränzel, Daniel Hoffmann, Marius Knaust, Patrick Lühne, René Meusel, and Stephan Richter supervised by Christian Holz, Dominik Schmidt, and Patrick Baudisch at the Human Computer Interaction Lab at Hasso Plattner Institute.